It's been an exciting month - and it still seems weird to see my face and name so large!
First, a project that really felt like my baby last year launched on mobile and desktop - a completely revamped LinkedIn Messaging experience. As the lead on iOS last winter, I learned so much on this project - and the team was really passionate about bringing the best experience to our users! My highlight reel would consist of architecting and implementing a threaded messaging system while taking into consideration issues on mobile like notifications, real time, pagination, caching, message failures and retrying logic. I worked with so many smart people on this, the many articles raving about the new experience are just the icing on the cake.
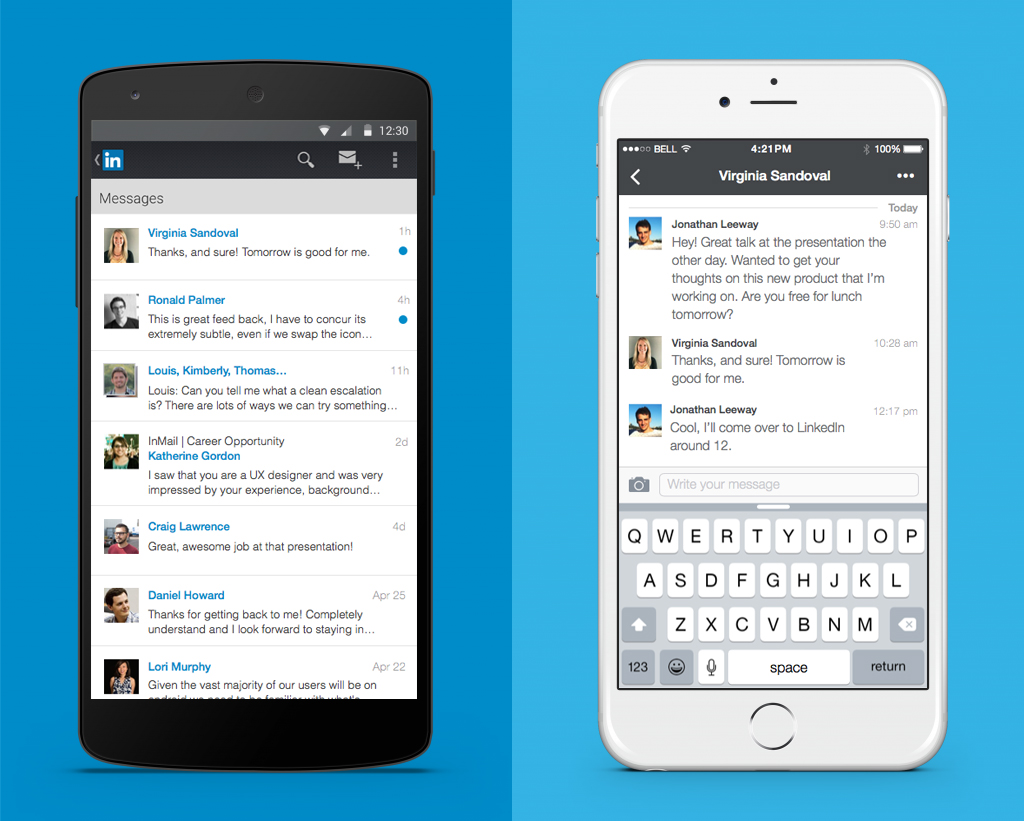
The new LinkedIn messaging experience on mobile
Second, and related to the first, I recently got contacted by Robert Lalah of the Jamaica Gleaner. For reference, the Jamaica Gleaner is a 180 year old newspaper in my home country of Jamaica, and its Sunday Gleaner commands 77.3% of Jamaican readership. So when Lalah reached out to me and asked about featuring me, I said yes - not realizing that they'd do a 3 page spread in the Sunday Gleaner!




I especially loved the questions, as it gave me a chance to talk about things that I'm passionate about - getting more women in STEM, more underrepresented minorities in STEM, and more opportunities for STEM fields in Jamaica. Since the article has come out, I've heard so many stories, both first hand and second hand, of people reading it to their daughters, of girls feeling inspired, of some of my own Jamaican peers feeling inspired, that I can't help but feel humbled and lucky to have gotten this platform.
One last note - I'm speaking at Grace Hopper next month! Very excited to be on this stellar panel talking about building and testing accessible iOS apps, one of my side passion projects. If you're one of the 10,000 women (!!) attending, swing by our panel or say hi at the conference. Will share the experience in a future post!
KT
Read more:
- http://blog.linkedin.com/2015/09/01/new-messaging-experience-comes-to-linkedin-finally/
- http://old.jamaica-gleaner.com/gleaner/about/
- http://anniepaul.net/2015/08/11/the-rjrgleaner-merger-part-1/
- http://jamaica-gleaner.com/article/outlook/20150913/kamilah-taylor-jamaican-link-linkedin
- https://www.linkedin.com/pulse/tech-everyone-kamilah-taylor