“I am a HAL 9000 Computer Production No. 3. I became operational at the H—A—L plant in Urbana, Illinois, on the 12th of January, 1992.”
Last Sunday, I stumbled upon this gem of an old pic.
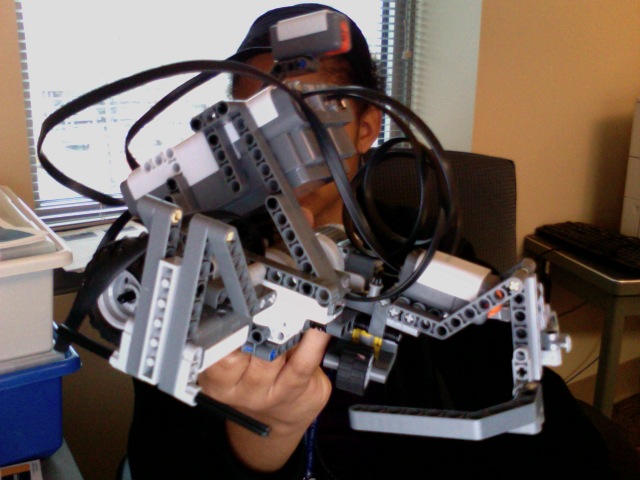
HAL, My Intensity Bug Robot. Yes, her name comes from 2001: A Space Odyssey, not because she was evil, but because she's from UIUC!
Background: In 2008, my advisor (Steve LaValle) assigned Bug algorithms (a category of planning algorithms) as my weekly reading. I identified what I thought was an oversight. These were supposed to be super simple, just a point robot magically navigating to some end location, only equipped with a touch sensor so that it could circumnavigate obstacles. Turned out, it needed much more than that - gps, compass, enough processing power to calculate slopes on the fly. So I decided to start with a robot that actually only had a touch sensor, and see how I could add a minimal set of sensors and have it reach its goal.
I can't remember how I came up with the idea of having the end location be a tower emitting a signal, but I do remember that this insight, combined with the subsequent insights of the exact pieces of information the robot would need, was the highlight of my grad school career.
I still had doubts that this would work in the real world, and it took me a while to find a signal that exhibited the properties I'd written about. The first time HAL successfully made it to the "tower", i.e. the infrared beacon source, was perhaps the second highlight. I probably should have kept around a video of me cheering!
KT
Further reading: http://link.springer.com/article/10.1007/s10514-013-9356-x
Rough copy: http://msl.cs.uiuc.edu/~lavalle/papers/TayLav14.pdf
HAL in action: